


ब्रशलेस सर्वो मोटर्सच्या ऑपरेशनचा मूलभूत सिद्धांत चुंबकत्वाच्या तत्त्वांभोवती फिरतो जेथे ध्रुव मागे हटतात आणि विरुद्ध ध्रुव आकर्षित करतात. सर्वो मोटरमध्ये दोन चुंबकीय स्रोत आढळतात: कायमस्वरूपी चुंबक जे विशेषत: मोटरच्या रोटरवर असतात आणि रोटरभोवती स्थिर विद्युत चुंबक असतात. इलेक्ट्रोमॅग्नेटला स्टेटर किंवा मोटर वाइंडिंग म्हणतात आणि ते स्टील प्लेट्सचे बनलेले असते ज्याला लॅमिनेशन म्हणतात, जे एकमेकांशी जोडलेले असतात. स्टील प्लेट्समध्ये सामान्यत: "दात" असतात ज्यामुळे त्यांच्याभोवती तांब्याची तार घाव घालू शकते.
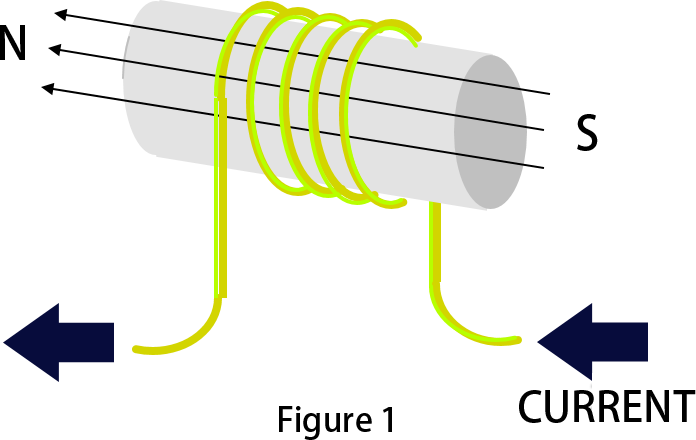
चुंबकत्वाच्या तत्त्वांकडे परत जाताना, जेव्हा तांब्याच्या तारासारखा कंडक्टर कॉइलमध्ये तयार होतो आणि कंडक्टरला उर्जा मिळते जेणेकरून त्यातून विद्युत प्रवाह वाहू लागतो, तेव्हा चुंबकीय क्षेत्र तयार होते.
कंडक्टरमधून विद्युतप्रवाहामुळे निर्माण झालेल्या या चुंबकीय क्षेत्रामध्ये उत्तर ध्रुव आणि दक्षिण ध्रुव असेल. चुंबकीय ध्रुव स्टेटरवर (उर्जित असताना) आणि रोटरच्या स्थायी चुंबकांवर स्थित असताना, तुम्ही विरुद्ध ध्रुवांना आकर्षित करणारी आणि ध्रुवांना मागे टाकणारी स्थिती कशी निर्माण कराल?
मुख्य म्हणजे इलेक्ट्रोमॅग्नेटमधून जाणारा विद्युत् प्रवाह उलट करणे. जेव्हा विद्युत प्रवाह एका दिशेने प्रवाहकीय कॉइलमधून वाहतो तेव्हा उत्तर आणि दक्षिण ध्रुव तयार होतात.

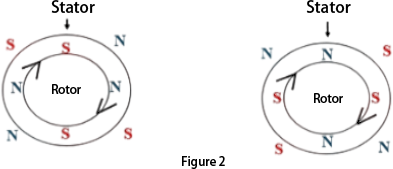
जेव्हा विद्युत् प्रवाहाची दिशा बदलली जाते, तेव्हा ध्रुव पलटले जातात त्यामुळे जो उत्तर ध्रुव होता तो आता दक्षिण ध्रुव आहे आणि त्याउलट. आकृती 1 हे कसे कार्य करते याचे मूलभूत उदाहरण देते. आकृती 2 मध्ये, डावीकडील प्रतिमा अशी स्थिती दर्शवते जिथे रोटर मॅग्नेटचे ध्रुव स्टेटरच्या विरुद्ध ध्रुवांकडे आकर्षित होत आहेत. मोटर शाफ्टला जोडलेले रोटर पोल स्टेटरच्या विरुद्ध ध्रुवाशी संरेखित होईपर्यंत फिरतील. जर सर्व समान राहिले तर रोटर स्थिर राहील.
आकृती 2 मधील उजवीकडील प्रतिमा दर्शवते की स्टेटरचे खांब कसे पलटले आहेत. प्रत्येक वेळी जेव्हा रोटरचा पोल विरुद्ध स्टेटर पोलला पकडतो तेव्हा त्या विशिष्ट स्टेटर स्थानावरून विद्युत् प्रवाह उलट करून हे घडते. स्टेटर पोलचे सतत पलटणे अशी स्थिती निर्माण करते जिथे रोटरचे कायम चुंबक ध्रुव नेहमी त्यांच्या स्टेटरच्या विरुद्ध दिशेने "पाठलाग" करत असतात ज्यामुळे रोटर/मोटर शाफ्ट सतत फिरते.
स्टेटर पोल फ्लिपिंगला कम्युटेशन असे म्हणतात. कम्युटेशनची औपचारिक व्याख्या म्हणजे "मोटारच्या योग्य टप्प्यांवर स्टीयरिंग करंट्सची क्रिया ज्यामुळे इष्टतम मोटर टॉर्क आणि मोटर शाफ्ट रोटेशन तयार होते". शाफ्ट रोटेशन राखण्यासाठी योग्य वेळी प्रवाह कसे चालवले जातात?
स्टीयरिंग इन्व्हर्टर किंवा ड्राइव्हद्वारे केले जाते जे मोटरला शक्ती देते. जेव्हा एखाद्या विशिष्ट मोटरसह ड्राइव्हचा वापर केला जातो तेव्हा ड्राइव्ह सॉफ्टवेअरमध्ये मोटर इंडक्टन्स, रेझिस्टन्स आणि इतर पॅरामीटर्ससह ऑफसेट कोन ओळखला जातो. मोटरवर वापरले जाणारे फीडबॅक डिव्हाइस (एनकोडर, रिझोल्व्हर इ.) ड्राइव्हला रोटर शाफ्ट/चुंबकीय ध्रुवाची स्थिती प्रदान करते.
जेव्हा रोटरची चुंबकीय ध्रुव स्थिती ऑफसेट कोनाशी जुळते, तेव्हा ड्राइव्ह स्टेटर कॉइलमधून जाणारा प्रवाह उलट करेल ज्यामुळे आकृती 2 मध्ये दर्शविल्याप्रमाणे स्टेटर पोल उत्तरेकडून दक्षिणेकडे आणि दक्षिणेकडून उत्तरेकडे बदलला जाईल. यावरून तुम्ही पाहू शकता की ध्रुवांना संरेखित करू दिल्याने मोटार शाफ्टचे फिरणे थांबेल, किंवा क्रम बदलल्यास शाफ्ट एका दिशेला विरुद्ध दुसऱ्या दिशेने फिरू शकेल आणि ते त्वरीत बदलण्यास अनुमती देईल. हाय-स्पीड रोटेशन किंवा स्लो शाफ्ट रोटेशनसाठी अगदी उलट.






